v1.0 · Available · Workbench size
ASTRO
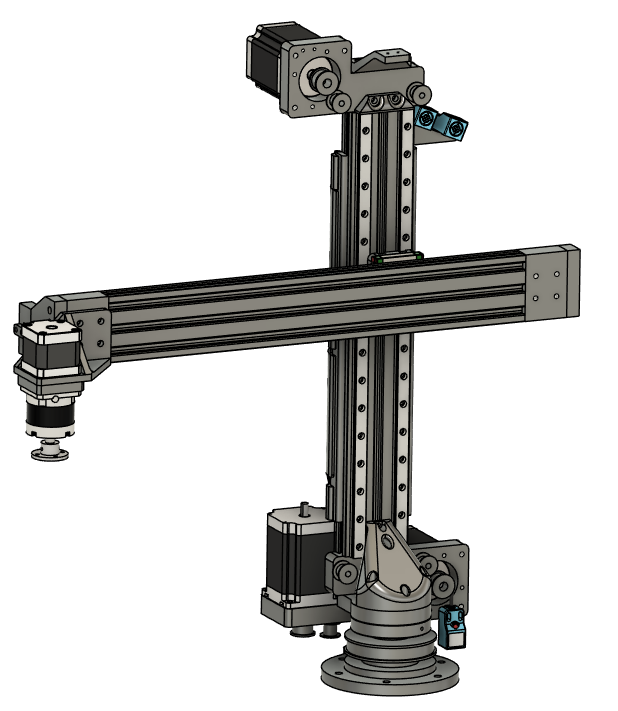
A hobby grade T-style 4-axis robot built for the workbench. CoreXY driven vertical and reach axes, powered by NEMA 23 motors with a precision cross-roller J1 bearing. Fully open source — buy the parts, build it yourself, and automate anything.
Getting Started
Buy
Source all parts with supplier links and download the full bill of materials.
Build
Step-by-step assembly guide covering mechanical build, wiring and soldering.
Automate
Connect to the SimpleRobotApp, configure your robot, and set up your first automation routine.
Specifications
Size Class
Workbench
Axis Types
J1: Rotary
J2 + J3: Linear CoreXY
J4: Rotary
Joint Ranges
J1: ±360 Degree
J2 (Vertical): 370mm
J3 (Reach): 400mm
J4 (Hand Rotation): Continuous
Max Payload
3d Printed: ~1.4 kg [~3 lbs]
Machined: ~3.6 kg [~8 lbs]
Speeds and Accels
Linear Speed: ~1500mm/s
Accel / Decel: ~1500mm/s
Control Hardware
External PC (Windows or Linux)
Control Software:
SimpleRobotController
Programming / Teaching
SimpleRobotApp (Windows or Android)
Python SDK
Input Power
110v or 220v – Single Phase
Control Power
24v 10a
Motor Types
J1: Nema 23
J2: Nema 23
J3: Nema 23
J4: Nema 17 + 10:1 Gearbox
