v1.0 · Available · Workbench size
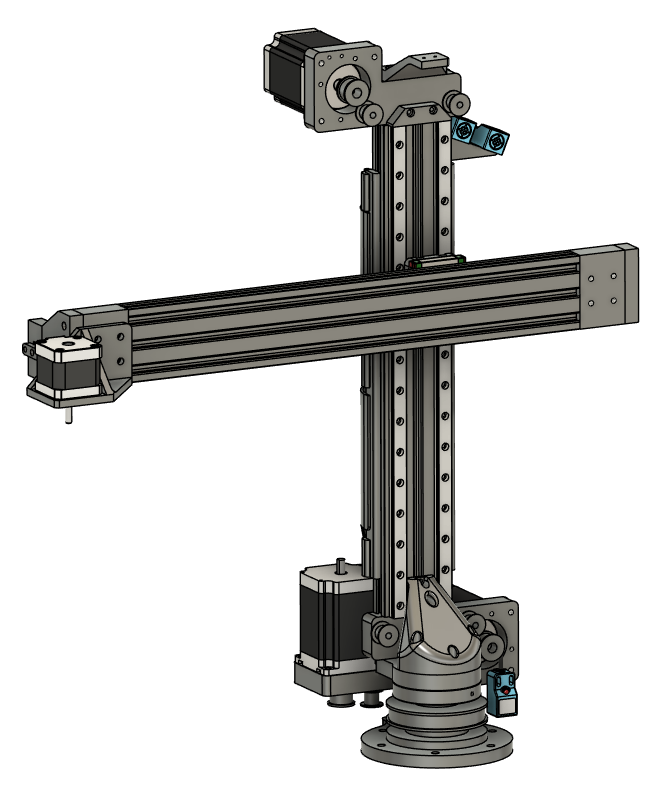
Tibert
A T-style 4-axis automation robot built for the workbench. CoreXY driven vertical and reach axes, powered by NEMA 23 motors with a precision cross-roller J1 bearing. Fully open source — buy the parts, build it yourself, and automate anything.
Specifications
Size Class
Workbench
Axes
4-Axis
Drive System
CoreXY
(J2+ J3)
Linear Rails
MGN12H
Rail Length
400mm
J1 Bearing
RU42
Cross-roller
Belt
GT2 10mm
Footprint
600mm * 600mm Cyclinder
Motors
J1 – Rotary Base
Nema 23
J2 / J3 – CoreXY
2x Nema 23
J4 – Rotary Wrist
Nema 17
(+ 10:1 Gearbox)
Reach & Payload
Work Envelope
380mm × 380mm
Height × diameter, no tool offset
3D printed payload
~1.4 kg (~3 lbs)
See additional note below
Machined payload
~3.6kg (~8 lbs)
The 3D printed version starts seeing noticeable flex starting around 3 lbs. The motors have ample torque beyond this — the limit is rigidity, not power. Machined parts significantly increase the realistic payload ceiling.
Get Started
Buy
Source all parts with supplier links and download the full bill of materials.
Build
Step-by-step assembly guide covering mechanical build, wiring and soldering.
Automate
Connect to the RMS app, configure your axes, and set up your first automation routine.
